 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling Vehicle-Type-Specific Pedestrian Crash Avoidance Behavior in Safety-Critical Interactions Using Smooth-Mamba Deep Reinforcement Learning
May 27, 2026As automated vehicles (AVs) increasingly share roadways with human-driven vehicles (HDVs), understanding how pedestrians respond to different vehicle types in safety-critical interactions is essential for the safe deployment of automated driving technologies. This study extracts safety-critical pedestrian-vehicle interactions from the Argoverse 2 dataset to capture real-world crash avoidance behaviors in encounters involving AVs and HDVs. To model vehicle-type-specific pedestrian crash avoidance behavior, we develop a Smooth-Mamba Deep Deterministic Policy Gradient framework, termed SMamba-DDPG, which integrates smooth action constraints with efficient temporal representation learning. To quantify pedestrian behavioral differences, the framework trains separate crash avoidance policies for pedestrian interactions with AVs and HDVs. Results show that SMamba-DDPG outperforms baseline reinforcement learning and supervised learning models in reproducing pedestrian crash avoidance behaviors. Reconstructed trajectories demonstrate strong behavioral realism, accurately reproducing crash avoidance kinematics in both AV and HDV scenarios. Reaction time analysis shows that the model captures human-like response delays and reveals that pedestrians respond more quickly to AVs than to HDVs. Counterfactual analysis further indicates that pedestrians adopt lower crossing speeds when interacting with AVs. Large-scale safety analysis of model-generated data revealed that pedestrian-AV interactions consistently yielded lower conflict rates and higher pedestrian yielding rates compared to pedestrian-HDV interactions. The findings highlight the importance of incorporating vehicle-type-specific pedestrian behavioral models for safer automated driving system design and more realistic traffic simulations in mixed-traffic environments.
Drone Data Analytics for Measuring Traffic Metrics at Intersections in High-Density Areas
Nov 04, 2024This study employed over 100 hours of high-altitude drone video data from eight intersections in Hohhot to generate a unique and extensive dataset encompassing high-density urban road intersections in China. This research has enhanced the YOLOUAV model to enable precise target recognition on unmanned aerial vehicle (UAV) datasets. An automated calibration algorithm is presented to create a functional dataset in high-density traffic flows, which saves human and material resources. This algorithm can capture up to 200 vehicles per frame while accurately tracking over 1 million road users, including cars, buses, and trucks. Moreover, the dataset has recorded over 50,000 complete lane changes. It is the largest publicly available road user trajectories in high-density urban intersections. Furthermore, this paper updates speed and acceleration algorithms based on UAV elevation and implements a UAV offset correction algorithm. A case study demonstrates the usefulness of the proposed methods, showing essential parameters to evaluate intersections and traffic conditions in traffic engineering. The model can track more than 200 vehicles of different types simultaneously in highly dense traffic on an urban intersection in Hohhot, generating heatmaps based on spatial-temporal traffic flow data and locating traffic conflicts by conducting lane change analysis and surrogate measures. With the diverse data and high accuracy of results, this study aims to advance research and development of UAVs in transportation significantly. The High-Density Intersection Dataset is available for download at https://github.com/Qpu523/High-density-Intersection-Dataset.
Knowledge-graph based Proactive Dialogue Generation with Improved Meta-Learning
Apr 19, 2020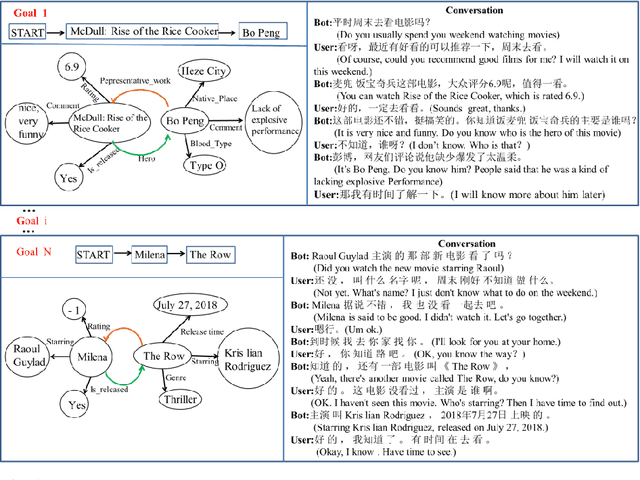
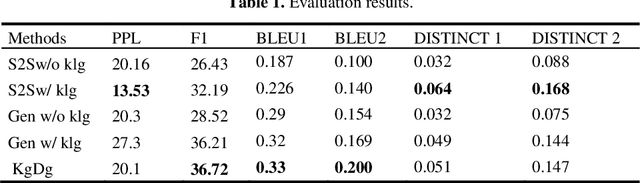
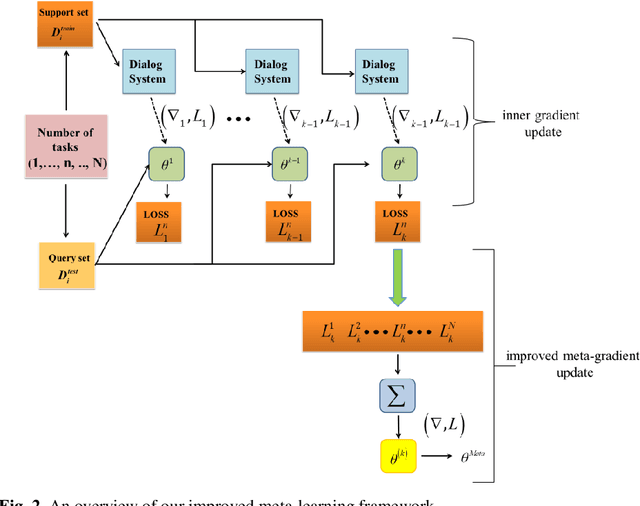

Knowledge graph-based dialogue systems can narrow down knowledge candidates for generating informative and diverse responses with the use of prior information, e.g., triple attributes or graph paths. However, most current knowledge graph (KG) cover incomplete domain-specific knowledge. To overcome this drawback, we propose a knowledge graph based proactive dialogue generation model (KgDg) with three components, improved model-agnostic meta-learning algorithm (MAML), knowledge selection in knowledge triplets embedding, and knowledge aware proactive response generator. For knowledge triplets embedding and selection, we formulate it as a problem of sentence embedding to better capture semantic information. Our improved MAML algorithm is capable of learning general features from a limited number of knowledge graphs, which can also quickly adapt to dialogue generation with unseen knowledge triplets. Extensive experiments are conducted on a knowledge aware dialogue dataset (DuConv). The results show that KgDg adapts both fast and well to knowledge graph-based dialogue generation and outperforms state-of-the-art baseline.